Engineering
Intelligence.
Hi, I'm Daniel Maldonado Naranjo. I specialize in Control Theory, Applied AI, and Robotics. I build autonomous systems that are safe, optimal, and resilient in uncertain environments.
More About Me




















Robotics
Autonomous Systems & Design
Control Theory
Safety & Optimization
AI & Compute
Machine Learning & Vision
Featured Projects
Adaptive control, reachability-based safety, and learning-based perception. The work I'd put in front of a hiring committee.
Adaptation & Obstacle Avoidance under Saturation
Lyapunov-stable adaptive control with control-barrier-function safety filters for a 6-DOF quadrotor under parametric uncertainty, input saturation, and obstacle constraints. Closed-loop guarantees, MATLAB and Simulink, hardware-ready.
Safety & Optimization
Guaranteed safe control for Dubins vehicles in obstacle-filled environments using HJ Reachability.
Dynamic Window Control
Real-time path planning and obstacle avoidance for quadrotors.

ML Video Upscaler
Enhancing video quality using advanced machine learning models.
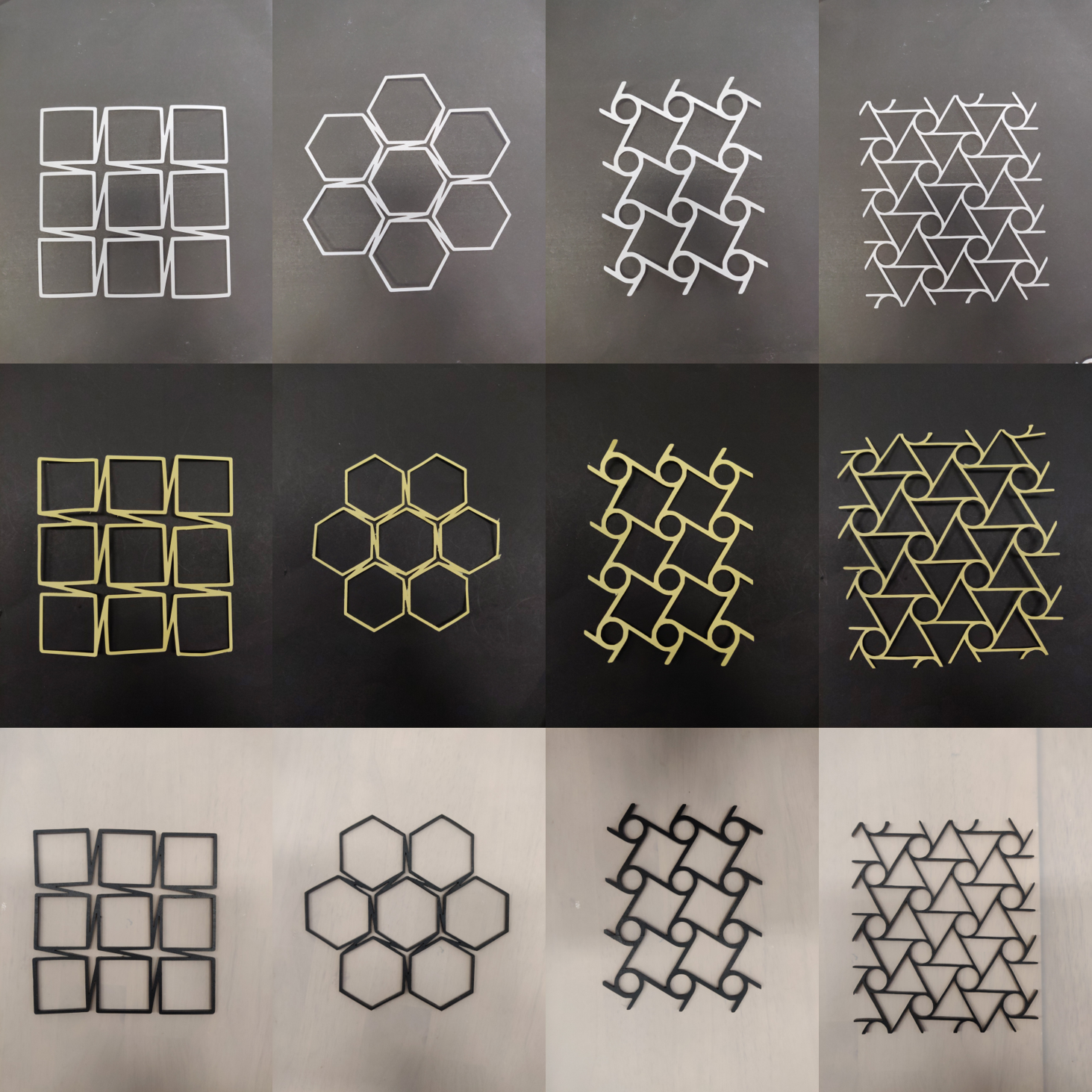
Auxetic Meta-Materials
Research, design, and manufacturing of novel structures with negative Poisson's ratio.

Dynamic Word Cloud
Javascript-based generator with image masking and pseudo-coloring.