Rapidly-exploring Random Tree (RRT)
This project focuses on the Rapidly-exploring Random Tree (RRT) algorithm for path planning in high-dimensional spaces. RRT incrementally builds a tree by randomly sampling the space and connecting nodes, efficiently exploring complex environments. The project showcases RRT's ability to find feasible paths in scenarios with numerous obstacles.
Simulation Results
Animations
The following animations illustrate the real-time path planning process of the RRT algorithm in various environments. These animations provide a visual representation of how the algorithm dynamically finds a feasible path.
Environment 1:
Environment 2:
Environment 3:
Environment 4:
Environment 5:
Environment 6:
Environment 7:
Environment 8:
Environment 9:
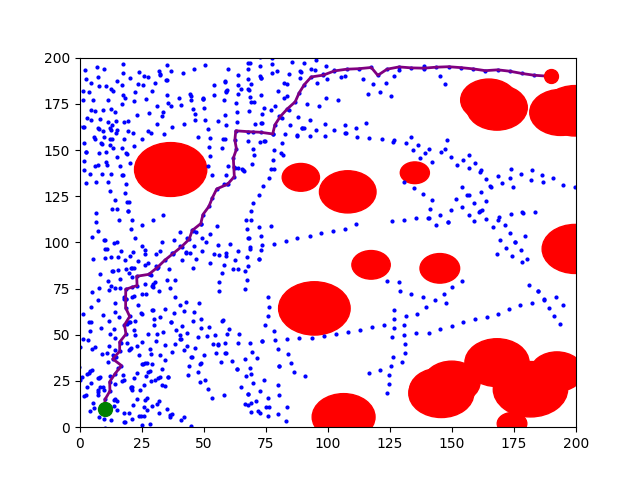
Static Images
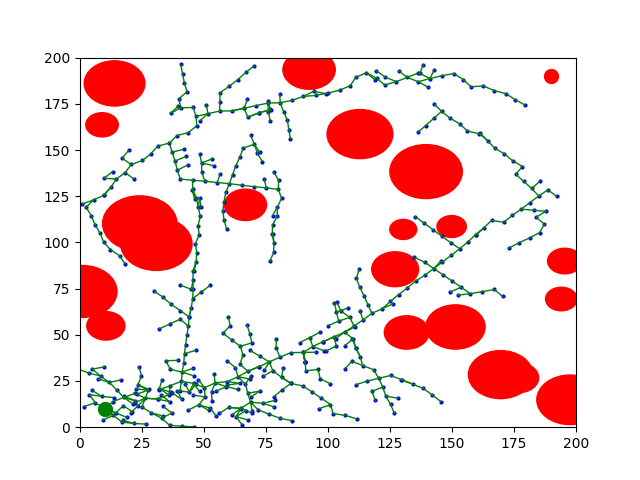
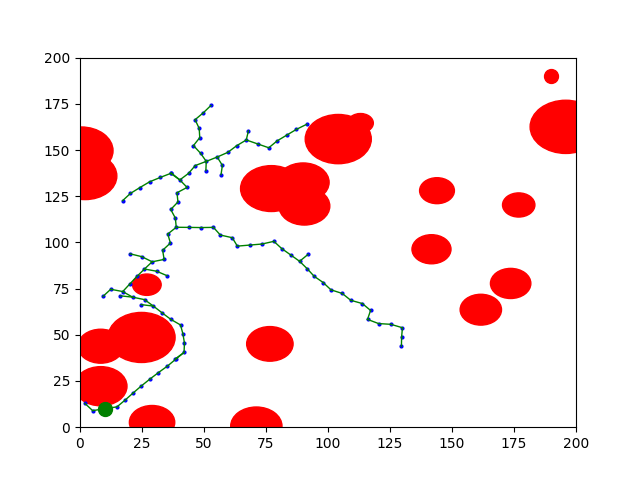
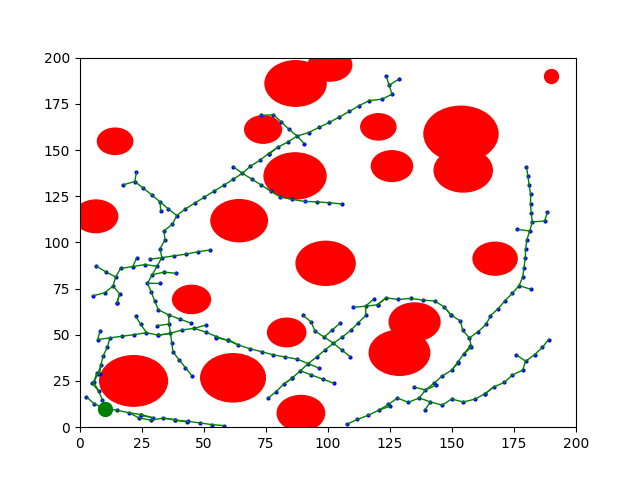
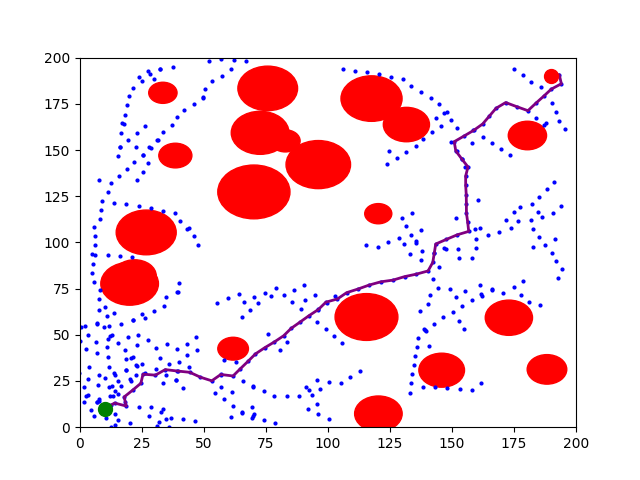
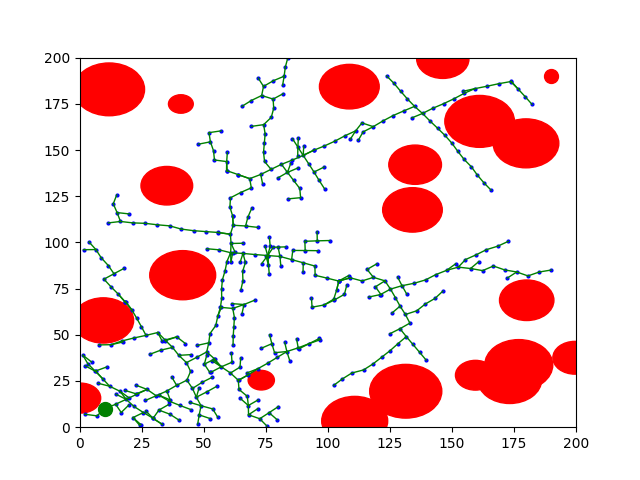
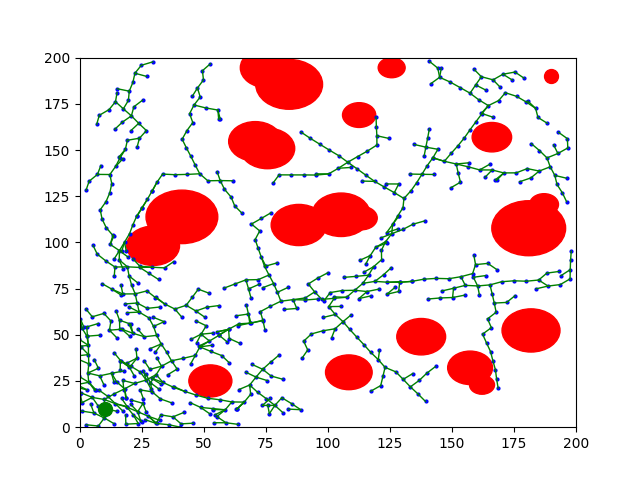
The following static images illustrate the paths planned by the RRT algorithm in different environments. Each image shows the start and end points, obstacles, and the feasible path found by the algorithm.
Environment 1:
Environment 2:

Environment 3:
Environment 4:
Environment 5:
Environment 6:
Environment 7:

Environment 8:
Environment 9: