Dynamic Window Approach
This project explores the Dynamic Window Approach (DWA) for real-time path planning in mobile robots. DWA considers the robot's kinematic constraints and obstacle avoidance, optimizing the trajectory in dynamic environments. The project includes simulations of the robot navigating through complex scenarios, demonstrating DWA's effectiveness.
Simulation Results
Real Time Visualization
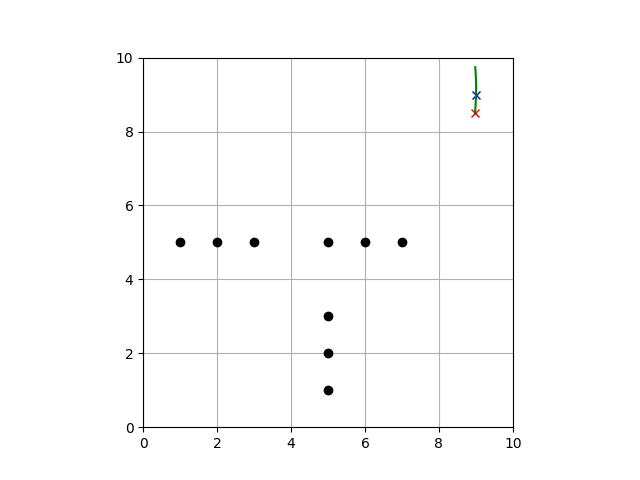
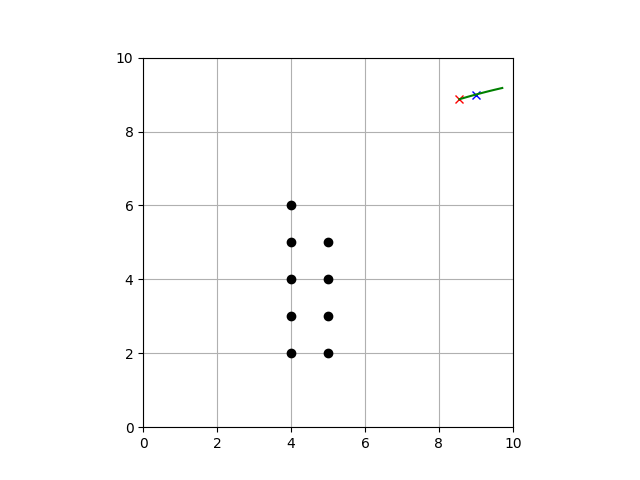
Environment 1:
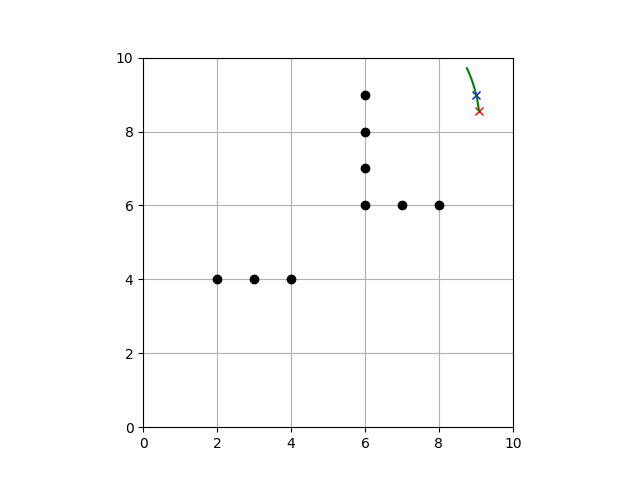
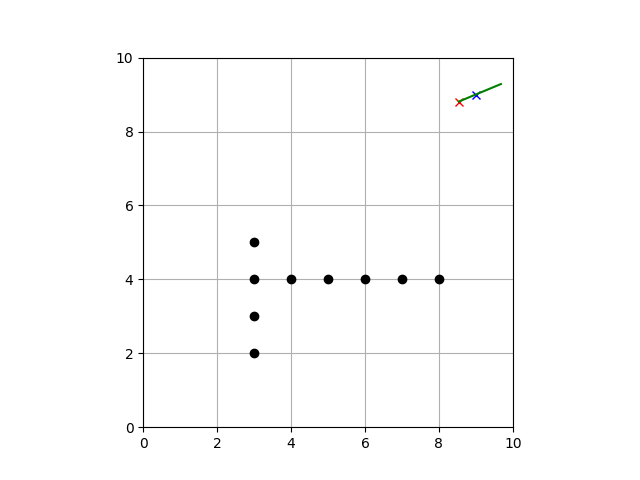
Environment 2:
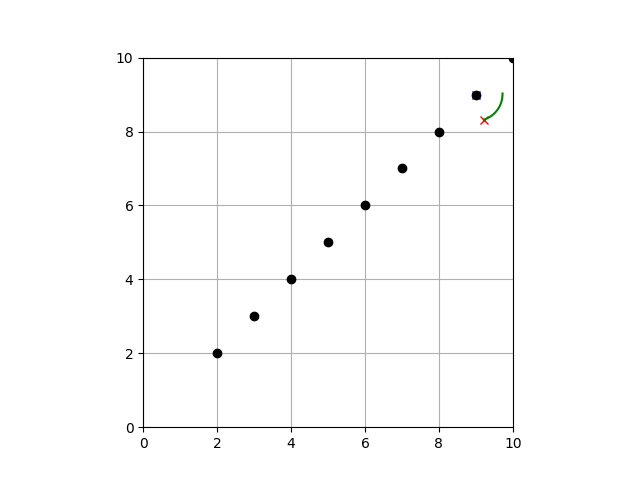
Environment 3:
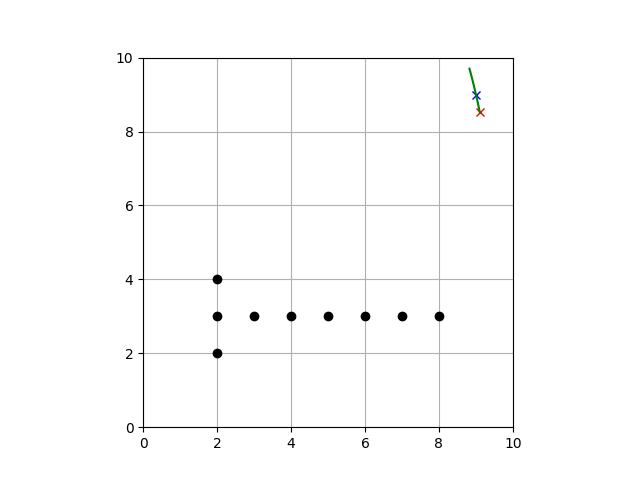
Environment 4:
Environment 5:
Environment 6:
Environment 7:
Environment 8:
Environment 9:
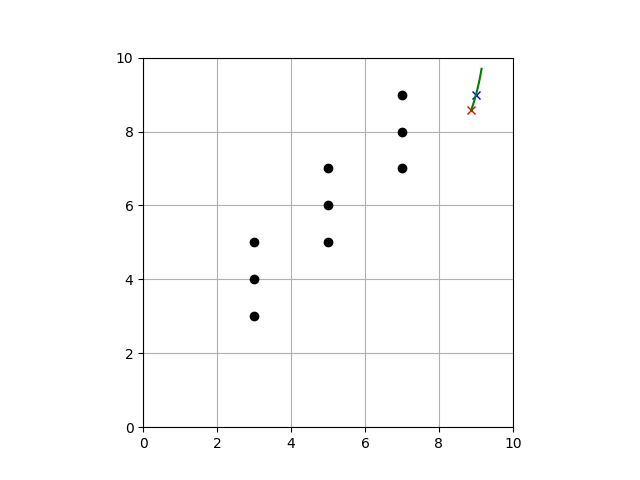
Static Visualization
Environment 1:
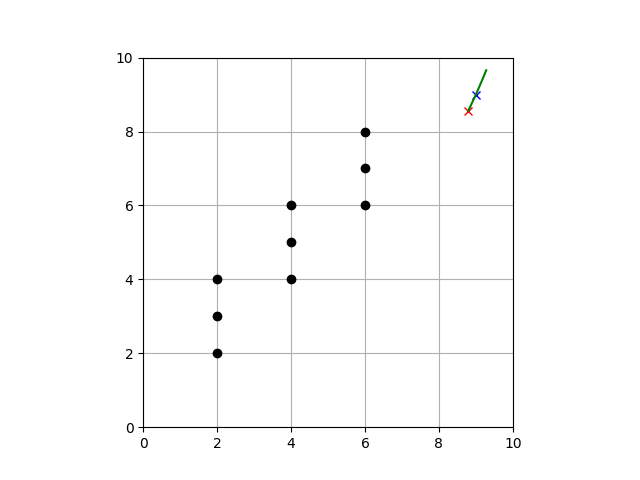
Environment 2:
Environment 3:
Environment 4:
Environment 5:
Environment 6:
Environment 7:
Environment 8:
Environment 9: