A* Path Planning
The A* Path Planning project involves implementing the A* algorithm to find the shortest path in a grid-based environment. This project demonstrates the effectiveness of A* in navigating through obstacles and optimizing path length. Simulations include various scenarios, showcasing the algorithm's robustness and efficiency. The A* algorithm is widely used in robotics and AI for its optimal and complete properties, making it suitable for pathfinding and graph traversal tasks.
Simulation Results
Static Images
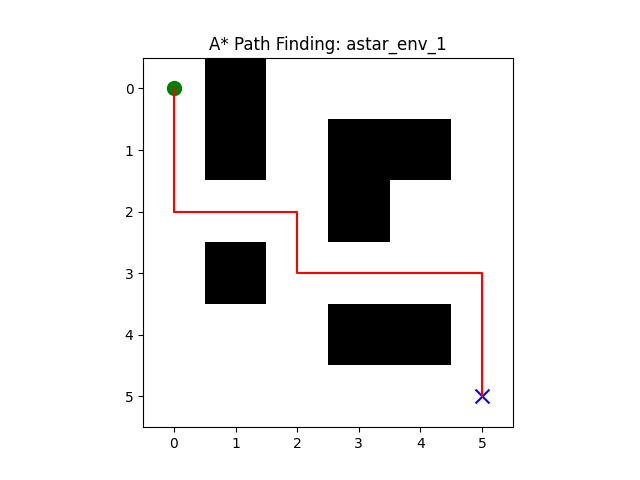
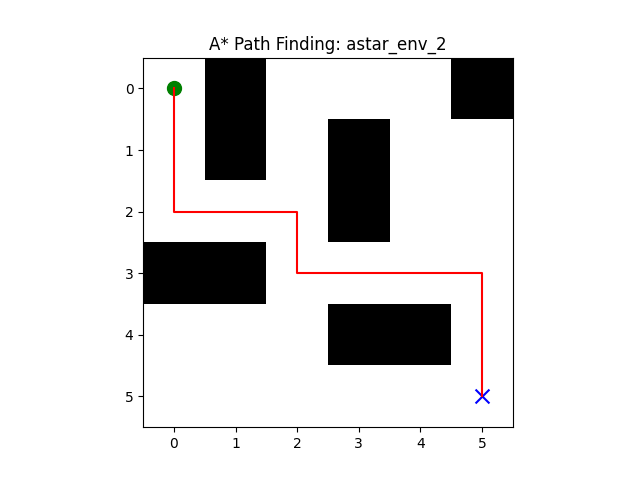
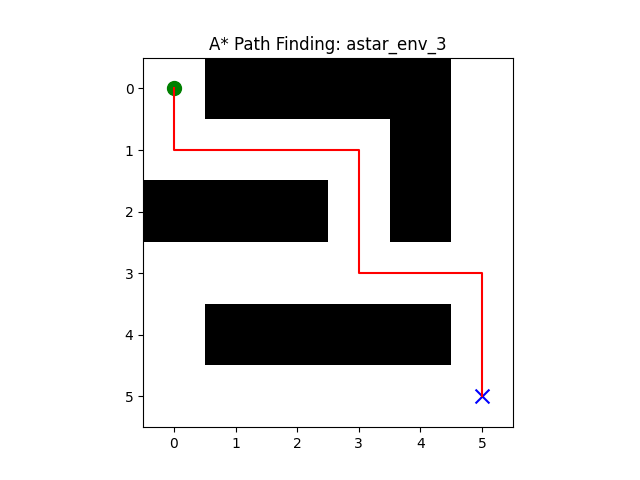
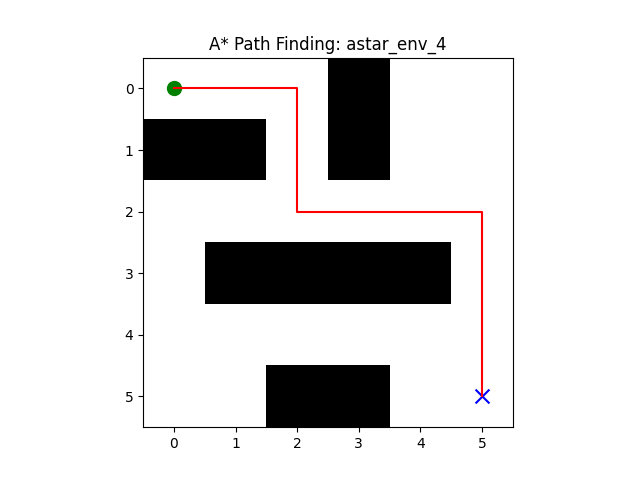
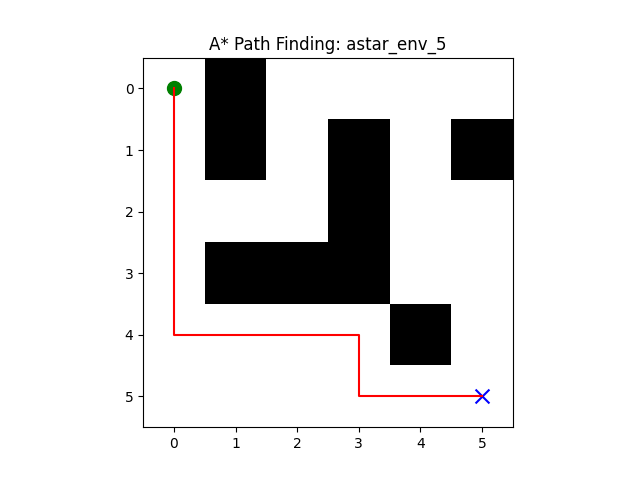
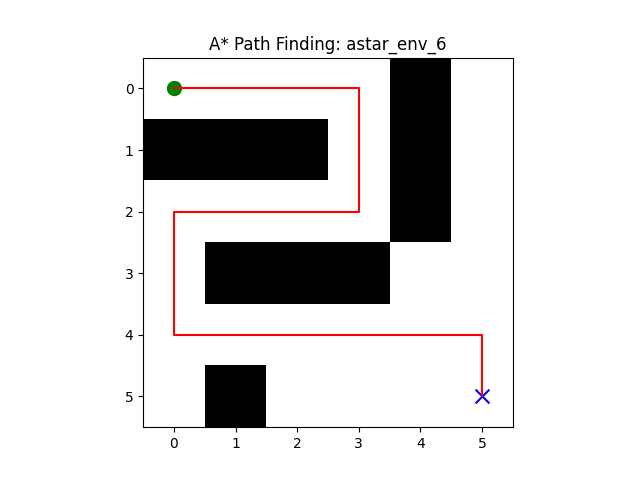
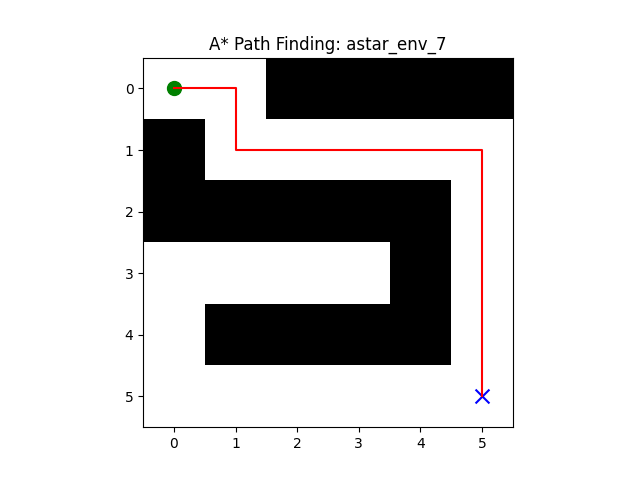
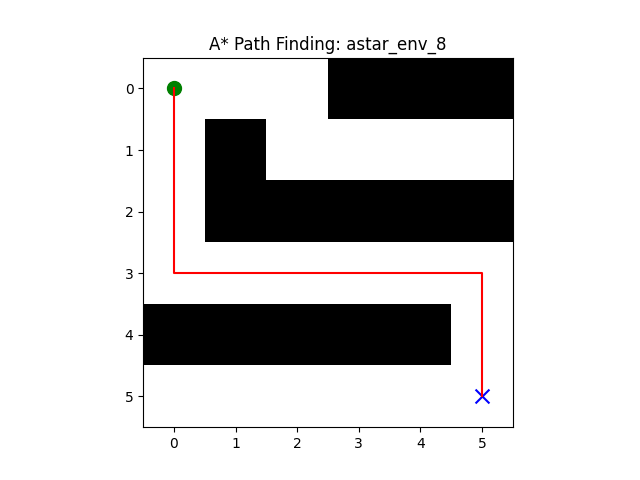
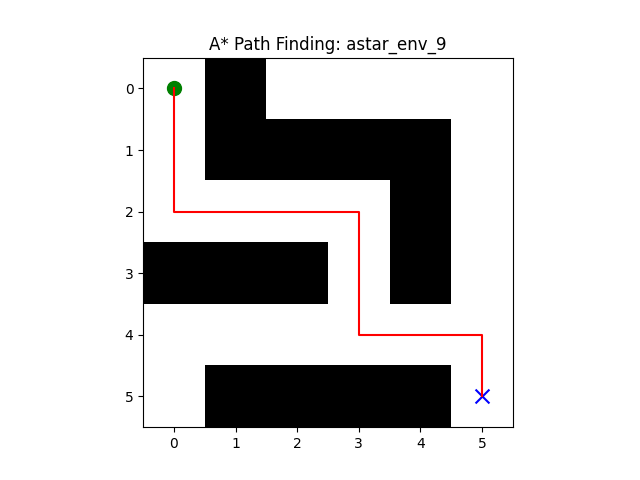
The following static images illustrate the paths planned by the A* algorithm in different environments. Each image shows the start and end points, obstacles, and the optimal path found by the algorithm.
Environment 1:
Environment 2:
Environment 3:
Environment 4:
Environment 5:
Environment 6:
Environment 7:
Environment 8:
Environment 9:
Animations
The following animations illustrate the real-time path planning process of the A* algorithm in various environments. These animations provide a visual representation of how the algorithm dynamically finds the optimal path.
Environment 1:
Environment 2:
Environment 3:
Environment 4:
Environment 5:
Environment 6:
Environment 7:
Environment 8:
Environment 9: