Back to Collision Avoidance
Model Predictive Control
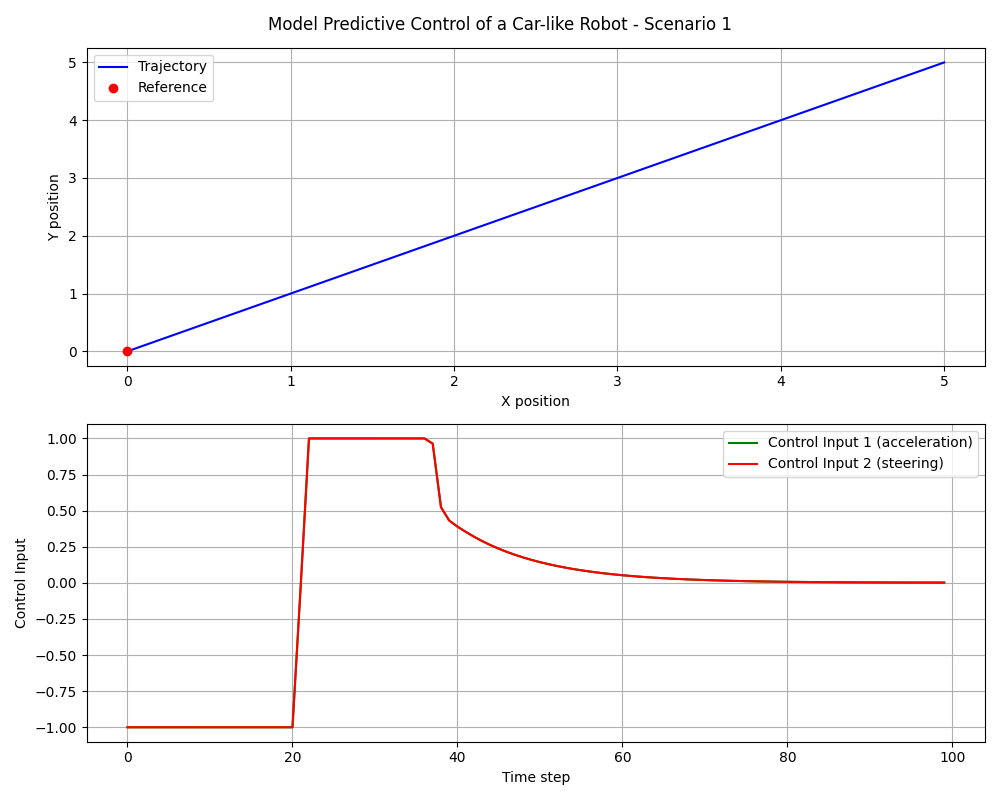
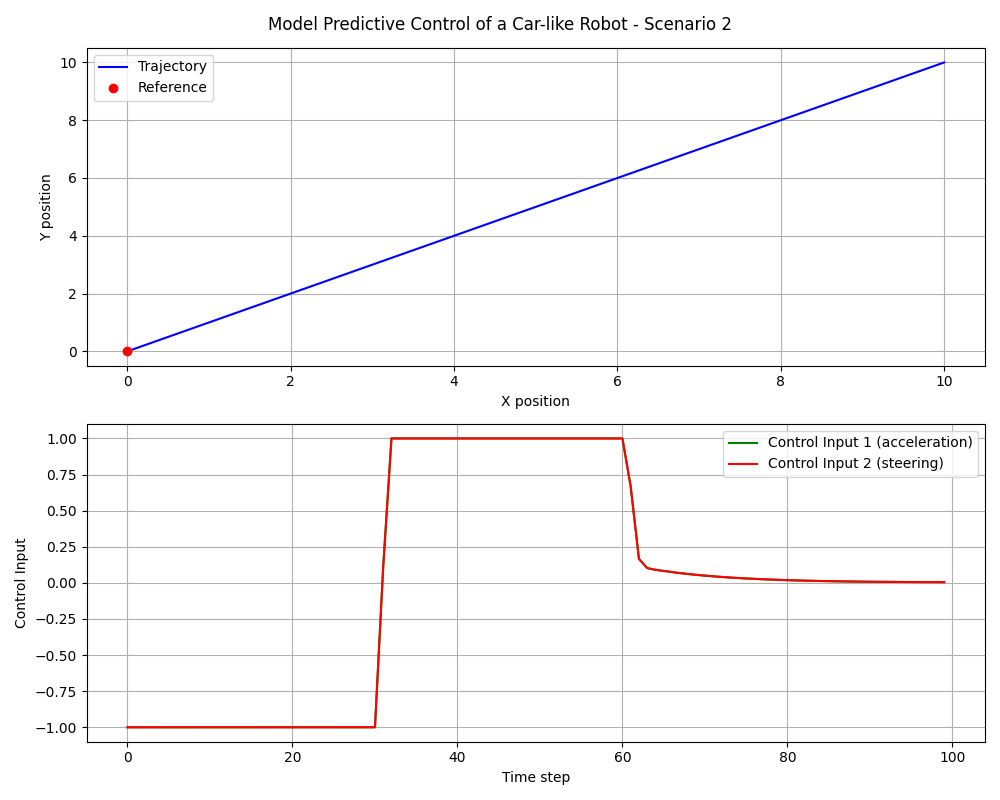
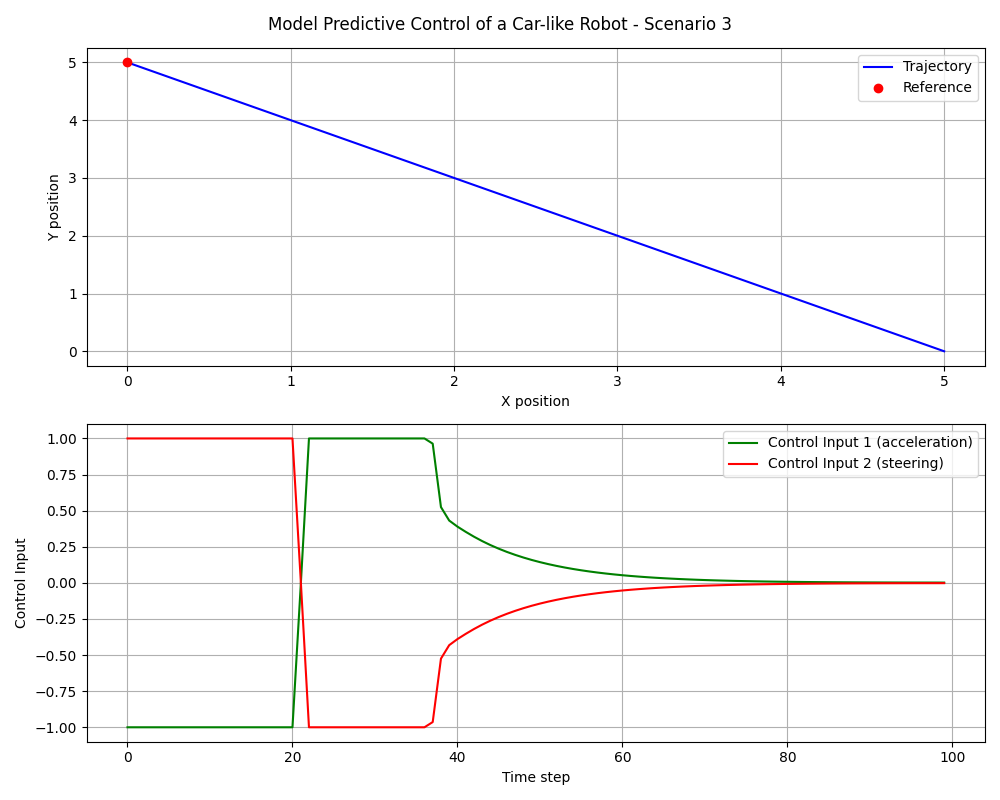
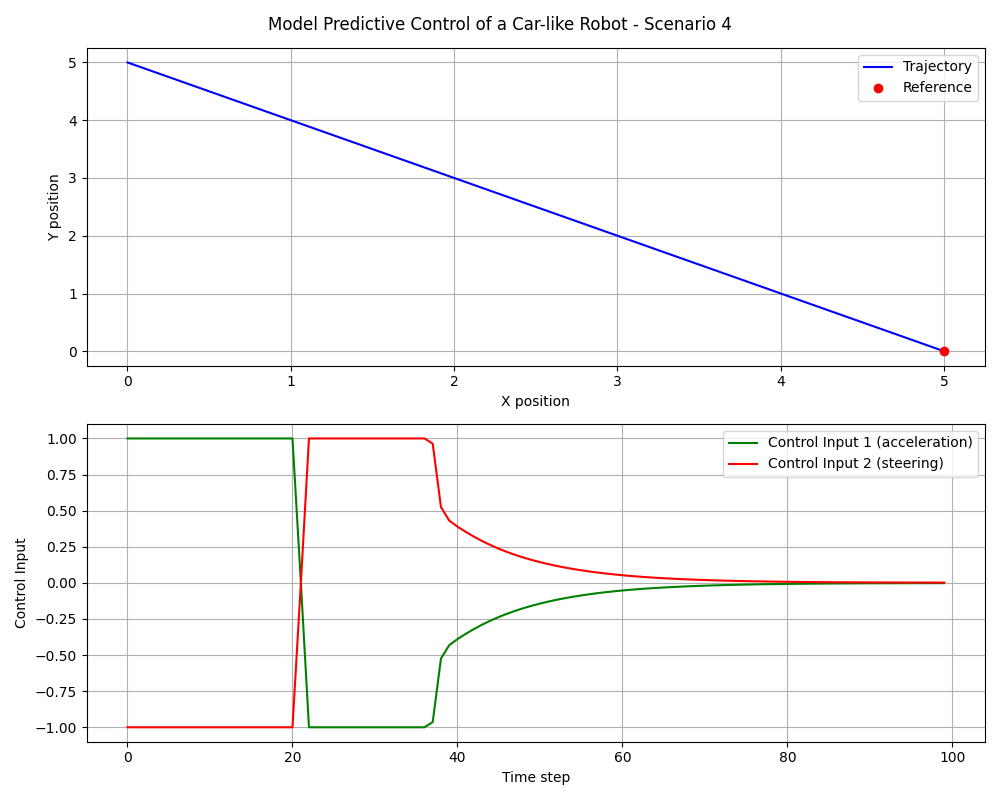
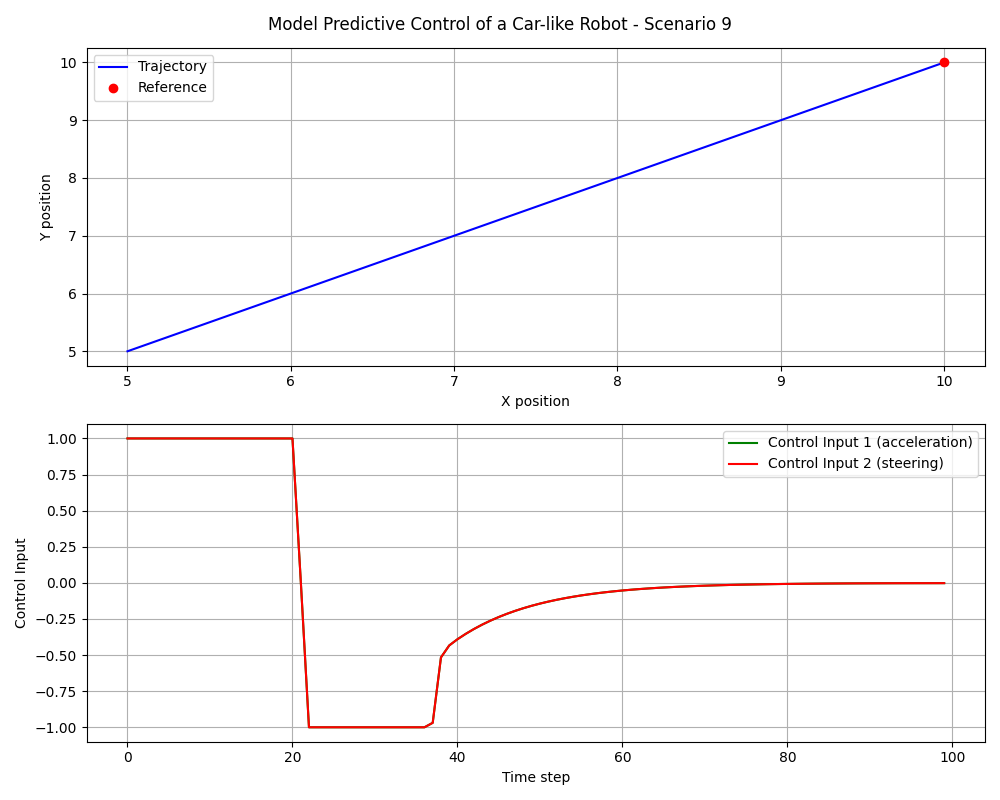
This project explores the application of Model Predictive Control (MPC) in a wheeled robot. MPC optimizes the control inputs over a finite horizon to predict the robot's trajectory. The project demonstrates how the robot follows a reference trajectory to a goal while kinetically avoiding collisions.