Back to Collision Avoidance
Line Follower & Avoidance
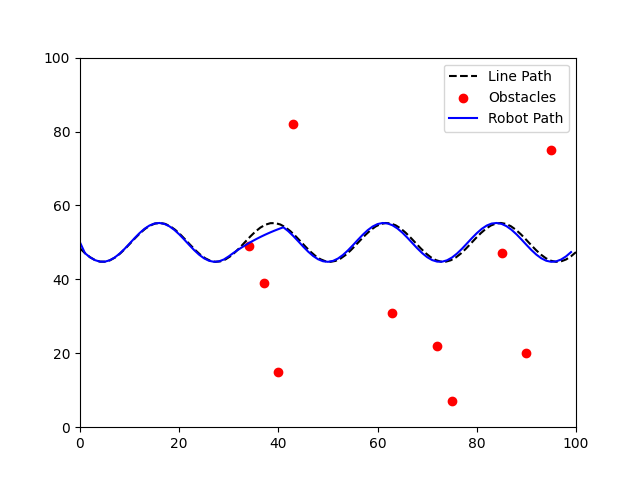
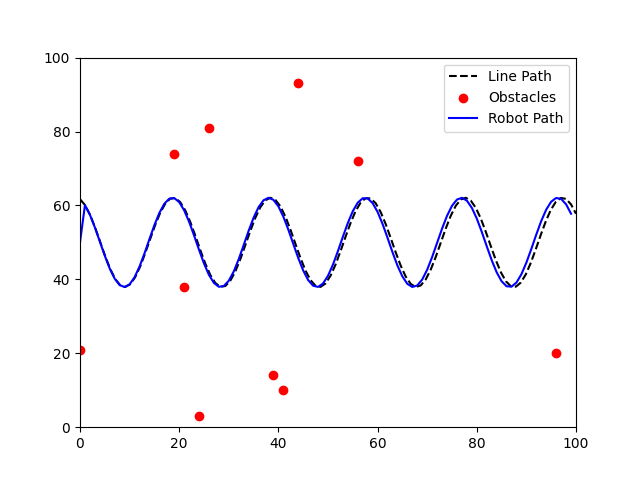
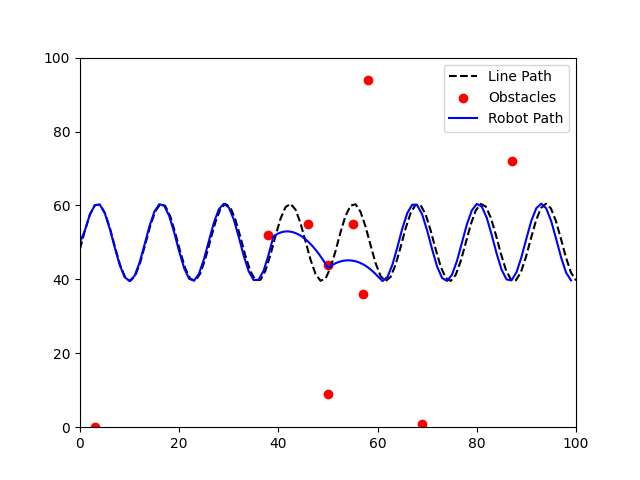
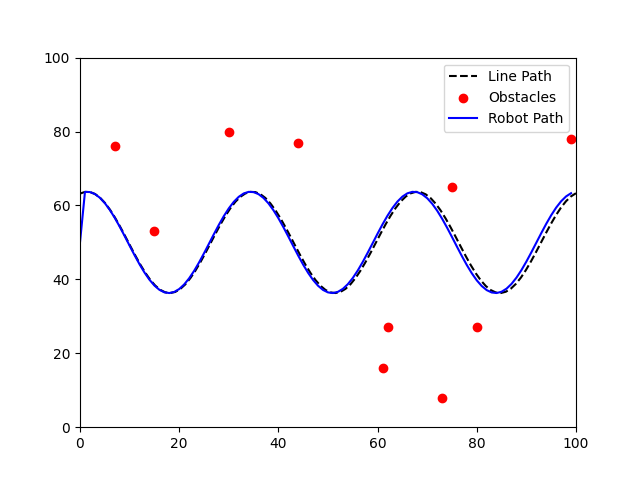
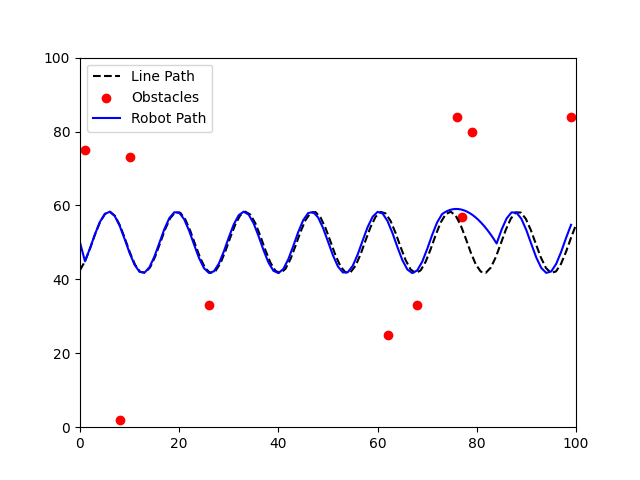
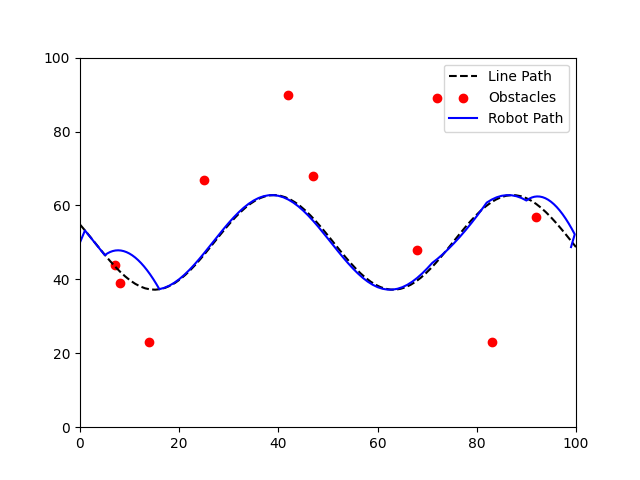
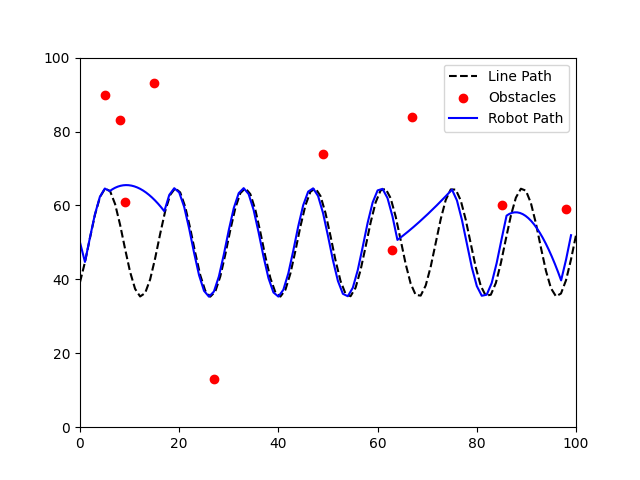
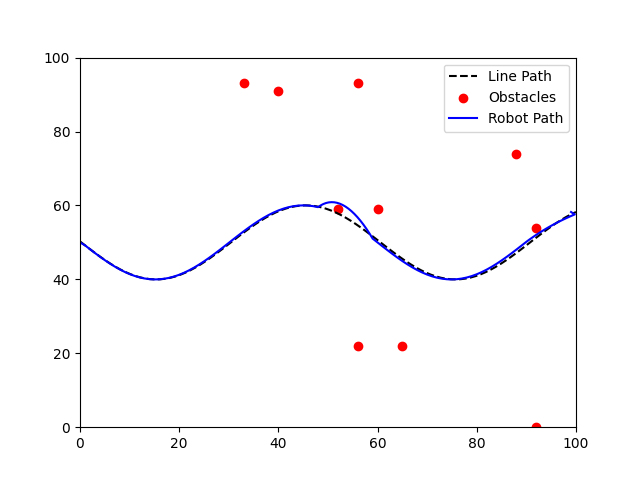
The Line Follower project integrates line-following capabilities with obstacle avoidance. By using IR sensors to detect lines and obstacles, the robot can follow a predefined path while avoiding collisions. The project demonstrates the integration of different sensor modalities and control algorithms for reliable navigation.