Back to Collision Avoidance
Drone Obstacle Avoidance
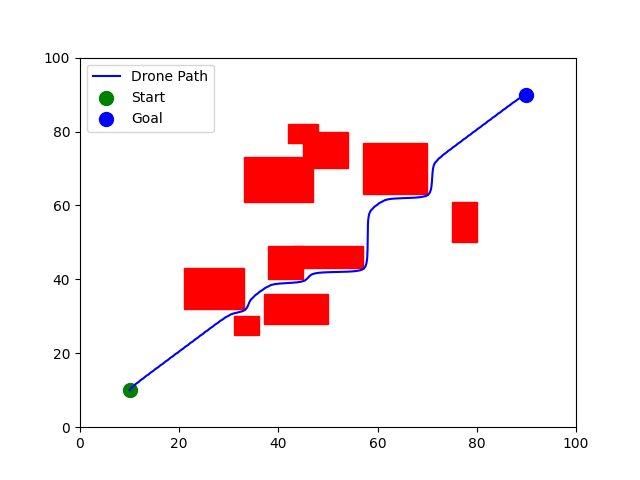
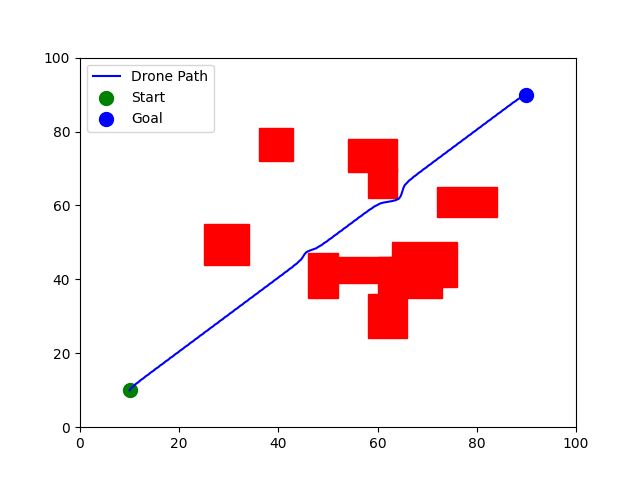
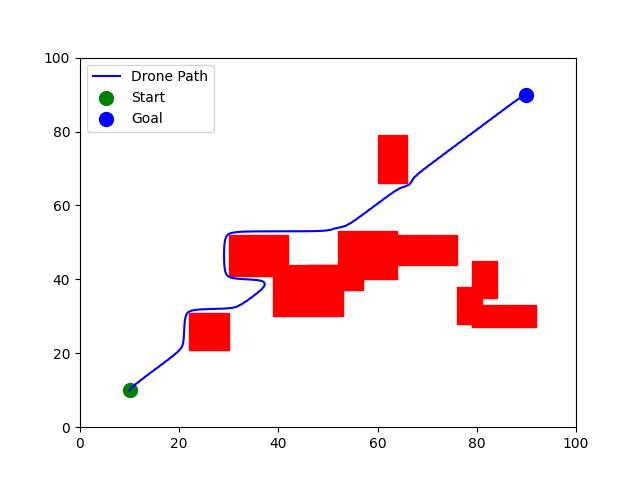
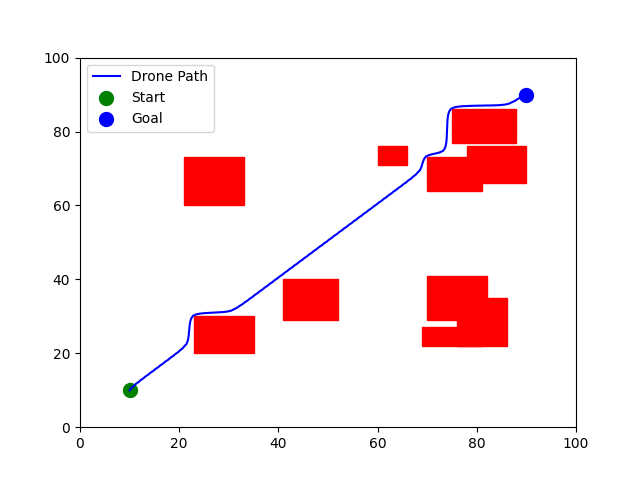
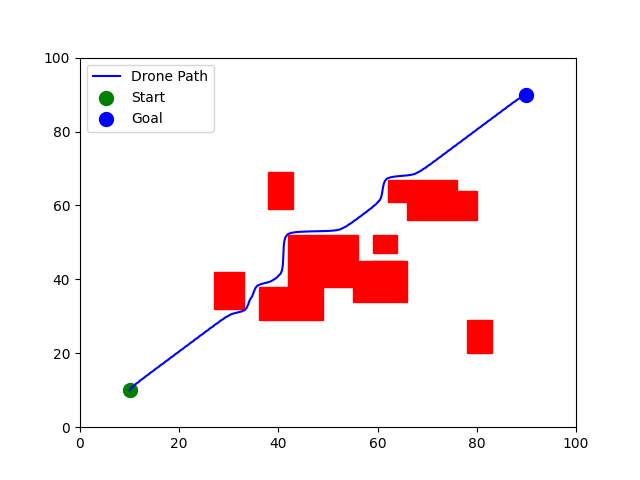
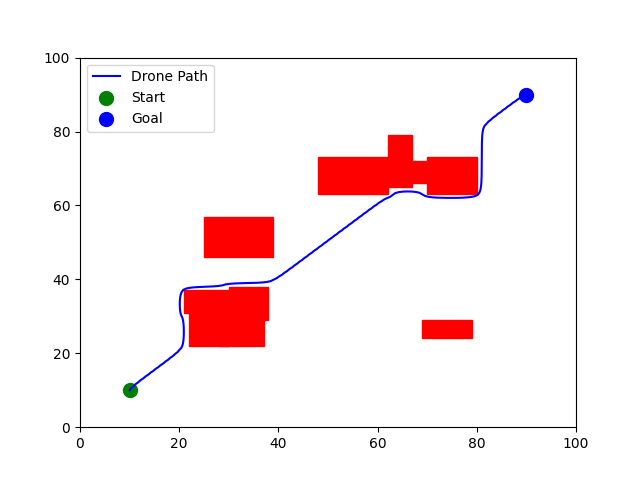
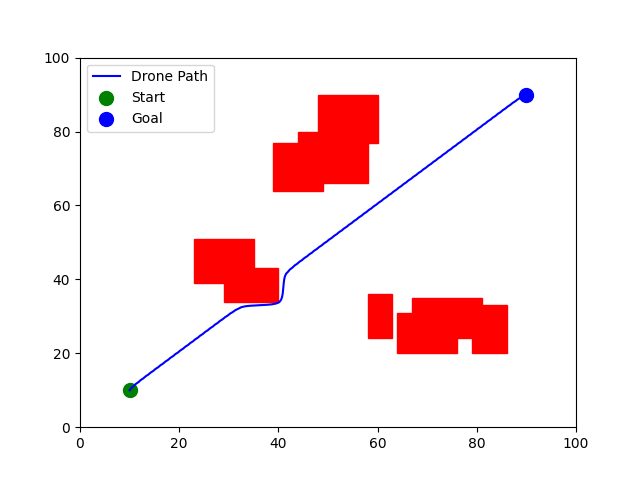
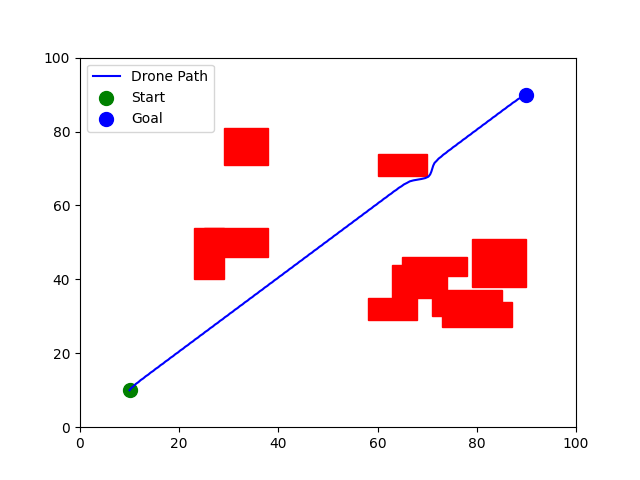
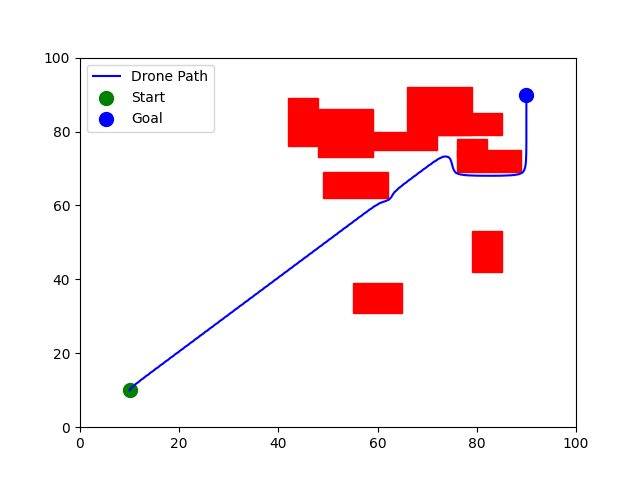
This project focuses on developing obstacle avoidance algorithms for drones. By using LIDAR sensors and real-time data processing, the drones can detect and avoid obstacles in their flight path. The project includes simulations showcasing the effectiveness of the algorithms in maintaining safe and efficient flight paths.