Augmented MRAC on a Magnetic Suspension & Balance System
Abstract
A 6-DOF Magnetic Suspension and Balance System (MSBS) levitates a wind-tunnel test article without mechanical mounts so that the wake measurement is uncontaminated by mounting-rod interference. The challenge is that the levitation controller has to fight noisy pose feedback, magnetic-actuator saturation, and gust disturbance at high dynamic pressure. The architecture pairs an LQR-PI baseline with an adaptive Model-Reference (MRAC) augmentation that activates when the closed-loop error departs from the reference model. The baseline gives nominal stability and frequency-domain margins; the adaptive augmentation extends the stable operating envelope by ~50 % in dynamic pressure beyond the LQR-PI alone.
Why Adaptive Control Here
The MSBS is a textbook case where a fixed-gain controller is fundamentally limited:
- The dominant nonlinearity is the magnetic force-distance law
F ∝ I² / d²; the operating point shifts with wind-tunnel dynamic pressure. - Pose feedback is noisy (camera-based 6-DOF tracking) and gain-limited at high frequencies.
- Magnetic actuators saturate well below what's needed to reject the worst-case gust at full dynamic pressure.
- Gain scheduling against dynamic pressure exists but doesn't capture the run-to-run variation in test-article geometry.
An adaptive augmentation handles all four sources of mismatch with the same online estimation law, instead of trying to schedule against each one separately.
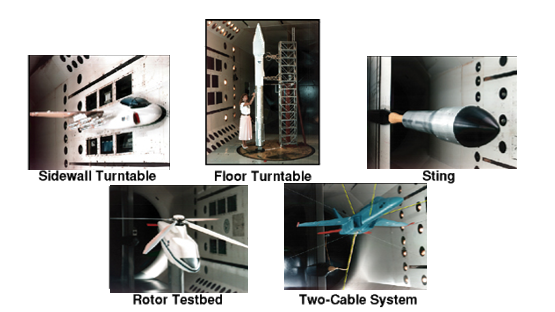
Wind tunnel test layout
Plant & Reference Model
Plant: 6-DOF rigid-body dynamics with magnetic-actuator force/torque mapping B(I) and modelled aerodynamic disturbance D(q, ρ_∞):
ẋ = A_p(ρ_∞) x + B(I) u + D(q, ρ_∞)
y = C x + ν
Where ν is camera measurement noise. Reference model: a desired closed-loop response chosen so that pose tracking meets the frequency-domain spec (settle time, overshoot, gain margin):
ẋ_ref = A_ref x_ref + B_ref r(t)
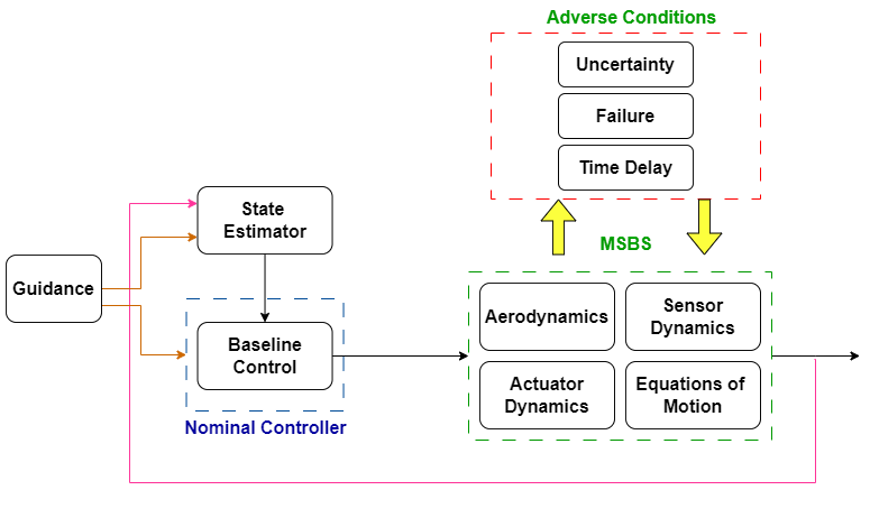
MSBS plant block diagram
Augmented Control Architecture
The control input is the sum of an LQR-PI baseline and an adaptive augmentation:
u = u_LQR-PI + u_AC
u_LQR-PI = −K_LQR x + K_PI ∫(r − y)
u_AC = Φ(x, r)ᵀ · θ̂
θ̂̇ = −Γ · Φ(x, r) · eᵀ P B
e = x − x_ref
The MRAC gradient law in the fourth line drives θ̂ from the reference-model error e = x − x_ref. P solves the Lyapunov equation A_refᵀ P + P A_ref = −Q; Γ is the adaptation rate. The architecture is "augmented" rather than "replacement" because u_LQR-PI stays in the loop the whole time; the adaptive augmentation only kicks in when e departs from zero, that is, when the LQR-PI baseline can't keep up with the disturbance or the actuator non-linearity.
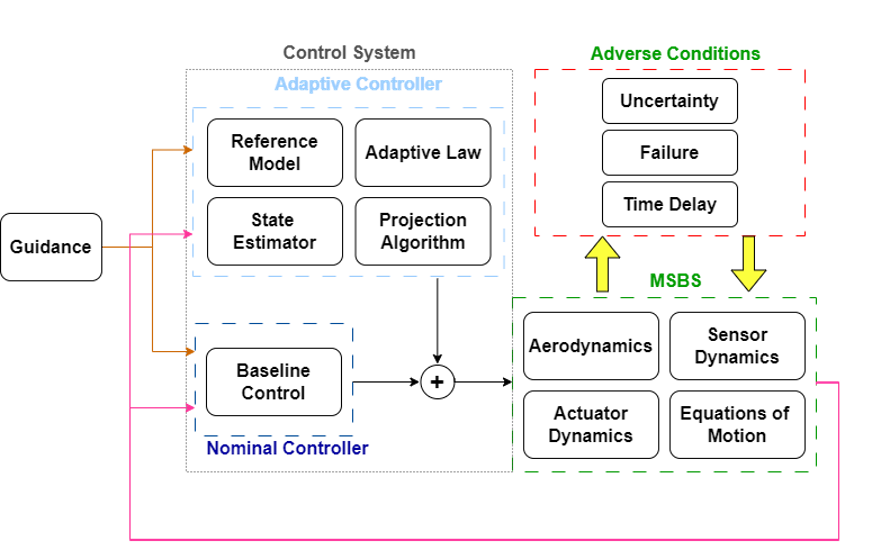
Augmented MRAC architecture
Stable vs Unstable Trajectory under Disturbance
Two MATLAB/Simulink runs at the same nominal operating point. Left: LQR-PI alone, the test article eventually drifts out of the levitation chamber when the gust disturbance pushes the magnetic-actuator command into saturation. Right: LQR-PI + adaptive augmentation, the augmentation absorbs the saturation transient and the test article re-centres in the chamber.
LQR-PI + AC · stable
LQR-PI alone · drifts out
Outcomes
- LQR-PI baseline. Designed and tuned in MATLAB/Simulink against frequency-domain spec (gain margin, phase margin, settling time). Improved the MSBS pose-tracking response over the legacy fixed-gain controller.
- Augmented MRAC. Extended the stable operating envelope to ~150 % of the LQR-PI-alone dynamic-pressure ceiling.
- Same architecture used in adjacent work. The 6-DOF quadrotor adaptive-control studies (CRM / ORM / Sat) on the adaptive-control category page reuse the same augmented-MRAC skeleton on a different plant.