Augmented Adaptive Control
6 DOF Non-Linear Quadrotor Adaptation and Obstacle Avoidance
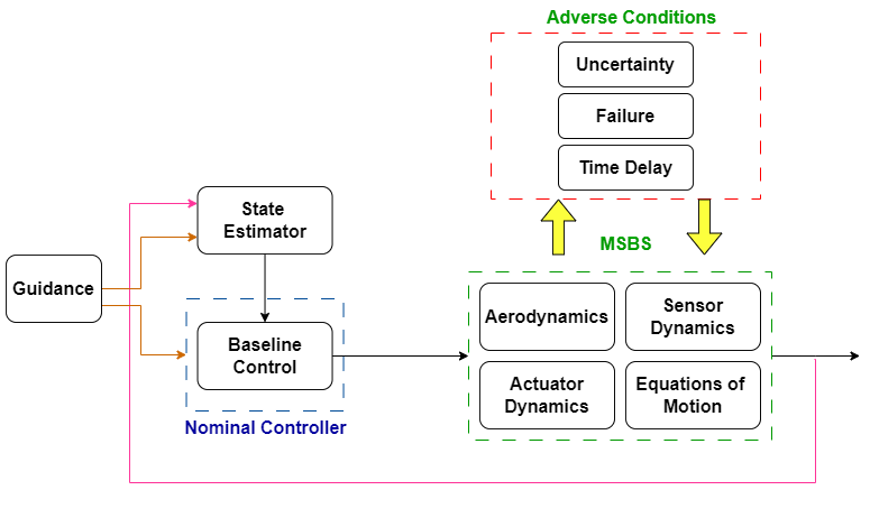
This project addresses the challenge of real-time control for dynamic systems, specifically focusing on a six-degrees-of-freedom (6 DOF) aerodynamic model of a quadrotor. Our proposed solution integrates a Linear Quadratic Regulator with Proportional-Integral (LQR-PI) controller and Adaptive Control (AC) through an augmented architecture:
- LQR-PI Controller: Serves as the baseline stabilizing controller.
- Adaptive Control (AC): Actively compensates for system uncertainties only when needed.
By combining these two control strategies, we aim to achieve robust performance in the presence of model inaccuracies and unforeseen disturbances, while maintaining a well-defined nominal control law.
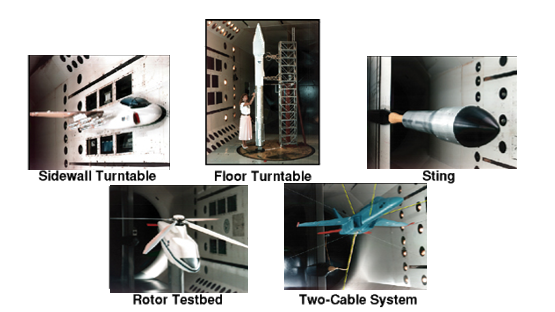
Magnetic Suspension and Balance System (MSBS)
The MSBS is designed to collect data for learning the dynamics of various systems without the need for mechanical supports that can cause wake interference. One key implementation challenge on real hardware is overcoming:
- Unreliable pose (state) feedback
- Noisy measurements
- Control saturation
- Improving stability at high wind velocities
In addressing these challenges, the system must account for constraints in both the frequency and time domains, ensuring robust stability and high performance.
Why Adaptive Control?
Adaptive Control offers a self-correcting control strategy that can handle system uncertainties using online information without further modeling. Key reasons include:
- Inherently Nonlinear: Many real-world systems (like the MSBS) exhibit nonlinear behaviors that must be handled robustly.
- Frequency Domain Requirements: Ensuring stability and performance across a wide frequency range, crucial for high dynamic systems.
- Lyapunov Stability Theory: Analysis and design rely on rigorous Lyapunov-based methods, guaranteeing system stability under adaptation.
- Continuous and Discrete Applicability: Can be implemented in both continuous-time and discrete-time control frameworks.
- Wide-Ranging Applications: Aerospace, propulsion, automotive, energy systems, etc.
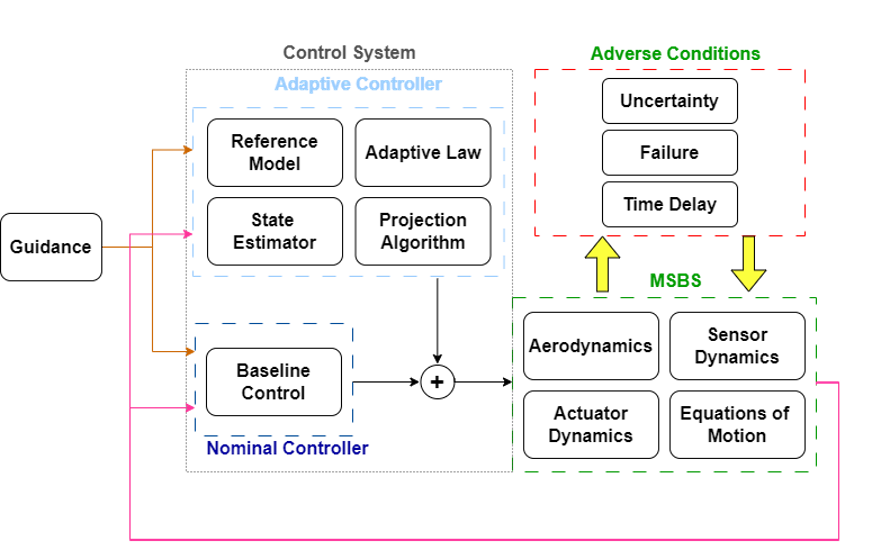
Proposed Control Architecture
We adopt an Augmented Model Reference Adaptive Control (MRAC) approach, layering adaptive laws on top of a nominal LQR-PI design:
- Baseline LQR-PI: Delivers nominal performance and frequency-domain stability improvements.
- Adaptive Augmentation (AC): Adjusts control signals online to compensate for changing plant parameters, disturbances, or measurement uncertainties.
By introducing adaptation only when significant errors or uncertainties arise, we maintain computational efficiency and high performance.
Simulation and Real-Hardware Considerations
In simulation (MATLAB/Simulink), the LQR-PI and Adaptive Control loop are combined to meet both time-domain and frequency-domain requirements. This setup is then translated to real hardware in the MSBS, where challenges like sensor noise, control saturation, and varying aerodynamic conditions are addressed.
Outcomes
- LQR-PI Controller Implementation: Developed and tested in MATLAB/Simulink, improving the Magnetic Suspension and Balance System’s frequency and time-domain requirements by 100%.
- Augmented MRAC Architecture: Extended the dynamic pressure testing range up to 150% by applying robust adaptive control techniques.
- Exit Presentation: Presented key findings and future research directions, demonstrating advanced control system design expertise and the benefits of adaptive control strategies for MSBS.
Original vs. Augmented Controller (New GIFs)
Conclusion
The integration of an LQR-PI controller with Adaptive Control significantly enhances the stability and performance of the Magnetic Suspension and Balance System. By seamlessly adapting to uncertainties in real-time, the proposed approach overcomes issues such as noisy measurements and control saturation, all while meeting frequency-domain requirements and sustaining performance at higher operating conditions.
The same augmented adaptive concept, demonstrated with a 6 DOF quadrotor model for rigorous testing, underscores the broad applicability of robust adaptive solutions in complex, uncertain environments.