Projects
A collection of my work in robotics, control theory, AI, and design.
Click on any card to dive deep into the technical details and simulations.
Click on any card to dive deep into the technical details and simulations.
drone_animation.gif)
Adaptive Control
Advanced adaptive control algorithms for a 6-DOF non-linear quadrotor system, ensuring stability under uncertainty.
View Project
Safety Reachability
Hamilton-Jacobi Reachability analysis for guaranteeing safe operation of dynamic systems in collision scenarios.
View Project
Path Planning
Evolutionary genetic algorithms and optimal trajectory generation for autonomous navigation in cluttered environments.
View Project
Machine Learning
Data-driven approaches to housing market prediction and pattern recognition using modern ML frameworks.
View Project
Collision Avoidance
Real-time collision avoidance systems for drone swarms and formation flying protocols.
View Project
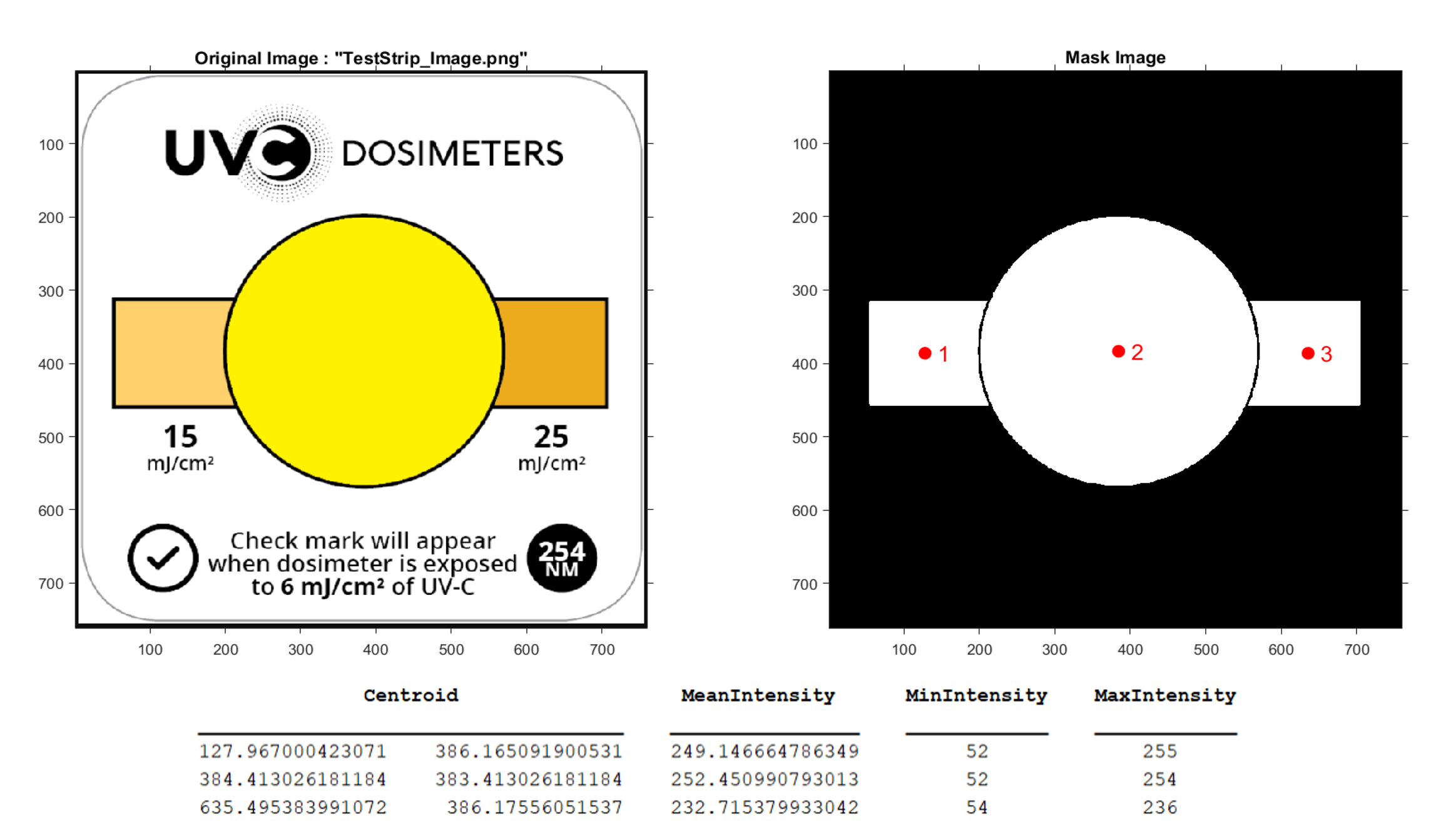
Image Processing
Techniques for computer vision, filtration, and feature extraction applied to real-world imagery.
View Project
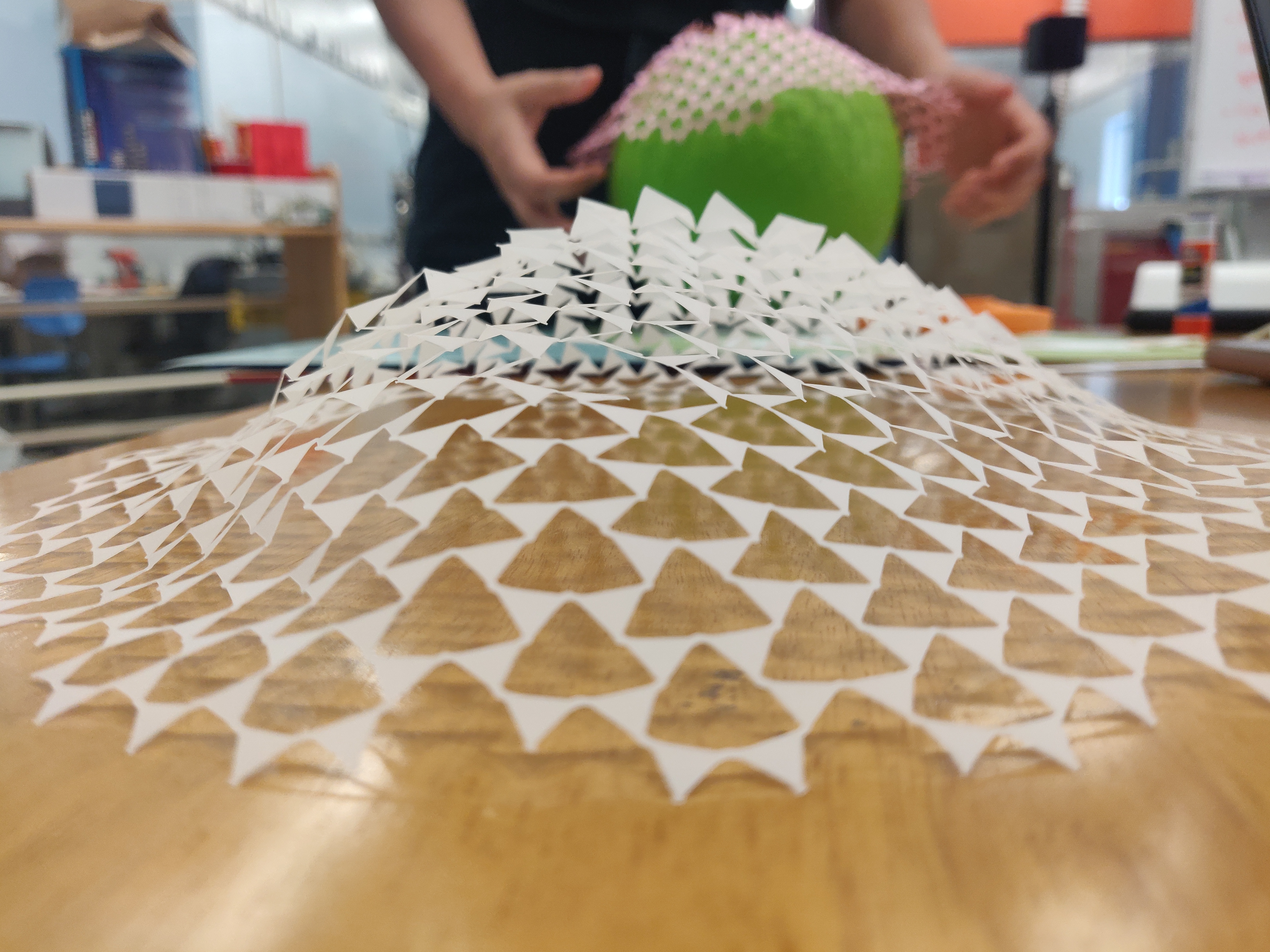
Engineering Design
Creative mechanical design projects, including deployable structures and innovative prototypes.
View Project